F-15 Flight Control
System
Part VI
Pitch Control Augmentation
By B. P. "PERRY" HOFFMAN/Senior Engineer, Flight Control Section, Avionics Engineering Laboratories
Pitch CAS/Single Channel - The operation of the pitch channel electronics is similar to yaw and roll in that Pitch CAS performs two functions. First, conventional stability augmentation improves ride comfort by reducing or eliminating undesirable aircraft motions from disturbances such as wind gusts. The second operation provides the pilot with precise control of aircraft performance by measuring the aircraft response to a given command, and adding or subtracting stabilator deflection as required to match the command to the "ideal."
Stability Augmentation - As shown in Figure 1, the prime sensor used for damping the unwanted pitch oscillations is the pitch rate gyro. When the aircraft receives a change in its flight path, the resultant rate of change is sensed by the rate gyro. A corrective signal is generated by the pitch rate sensor and is fed to a buffer demodulator, then a rate canceller (which eliminates steady signals), and to a variable limiter (which eliminates switching transients during landing
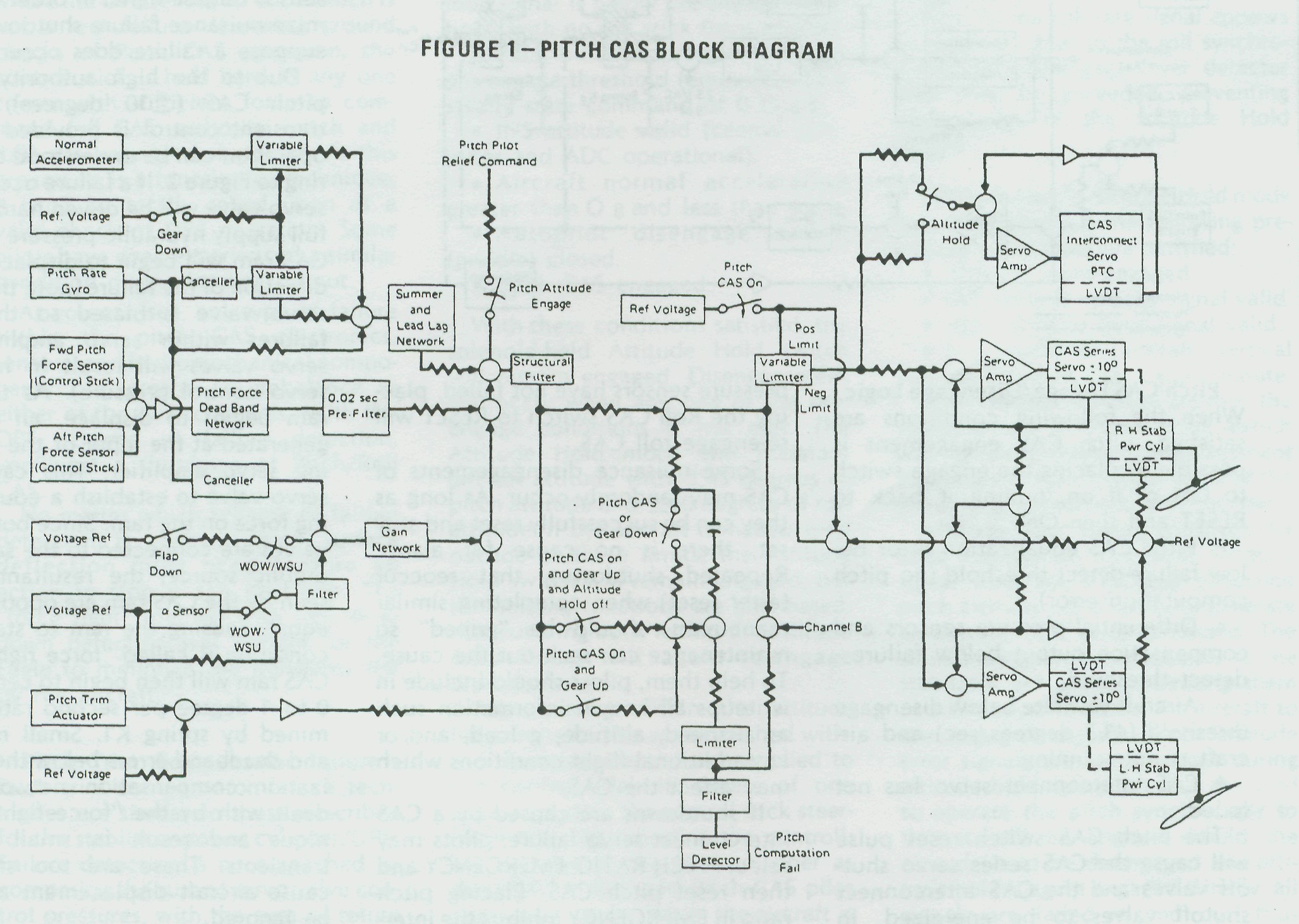
gear operations). The rate signal is then summed, shaped, and sent to a structural filter which reduces frequencies that would cause coupling to the airframe, producing unwanted stabilator oscillation.
The variable limiter performs two functions. When the Pitch CAS switch is reset, the limiter slowly increases CAS authority from zero to 10 degrees. Secondly, it forces the roll and pitch channels to share the 10 degree authority over the stabilator actuators by limiting the amount of CAS series servo deflections either channel can command when the mechanical pitch deflection is greater than 18 degrees nose up.
The modified corrective rate signal is then applied to a servo amplifier which electrically commands the servo valve to extend or retract the 10 degree CAS series servo (internal to the stabilator power cylinder), repositioning the main power cylinder control valve, and porting hydraulic pressure to the power cylinder main ram piston. When the main ram piston deflects, it repositions the stabilator control surface in a direction to stop the unwanted airframe disturbance. An electrical follow-up signal is generated by the 10 degree CAS series servo Linear Voltage Differential Transformer (LVDT) which opposes the corrective rate signal input. When sufficient series servo deflection is obtained to match the rate signal input, series servo deflection stops. The aircraft rate of change in its flight path will grow smaller, and the follow-up LVDT signal starts to return the series servo to neutral. When the aircraft flight path is again stabilized, the rate signal is zero and the CAS series servo is at neutral.
Pitch Control Augmentation - Looking again at Figure 1, find the forward and aft pitch force sensors (F-15A or TF-15A). Longitudinal stick force commands from one (or both) control stick force transducers are summed together and fed through a deadband/ dual-gradient circuit (prevents over-sensitivity near null and reduces stick forces during sustained high "g" maneuvers). The resultant stick force command then goes through a 0.2 second pre-filter for smoother system responses to sharp pilot inputs (this improves tracking characteristics). The shaped command signal is then sent through the same structural filter as the stab aug rate signal, and on to the variable limiter. The variable limiter, used for stab aug and pilot commands, has the same reason for being in the circuit and operates the same as was explained in the stab aug section.
The pilot command is then sent equally to the left and right servo amplifiers which electrically command the servo valve to extend or retract the 10 degree CAS series servo, repositioning the main power cylinder control valve, and porting hydraulic pressure to the power cylinder main ram piston. Deflection of the piston repositions the stabilator control surface in the direction desired. Two LVDT follow-up signals are generated by the movement of the stabilator power cylinder. The main ram LVDT signal provides the intelligence for the variable limiter, telling the limiter just where the stabilator control surface is located. The other follow-up signal is again the CAS series servo position and stops series servo displacement when the input signal level is matched. Aircraft response to a pilot's stick force command is measured by the pitch rate gyro and normal accel-erometer sensor outputs. These signals meet at the summing/lead lag network. If the measured response after summation does not agree with the control stick force command, the difference is fed to the stabilator actuators, adding or subtracting control surface deflection until the difference is zero. This is called "blending of command and surface deflection" to achieve the ideal aircraft response.
Up to now, we've considered an aircraft with landing gear and flaps up. When the gear handle is positioned down, normal acceleration signals and the pitch rate canceller circuit are eliminated. The removal of normal acceleration is necessary to get rid of transients due to aircraft impact with the runway. Removal of the pitch rate canceller circuit at the same time insures stable longitudinal control during approach and landing. The reduction of these two signal levels is achieved through variable limiters which have a one-second time constant for fade in or out.
Angle-of-attack signals are also used by the pitch CAS to inhibit stalls andmatch the pitch CAS to the mechanical control system stabilator command characteristics during high angle of attack maneuvers.
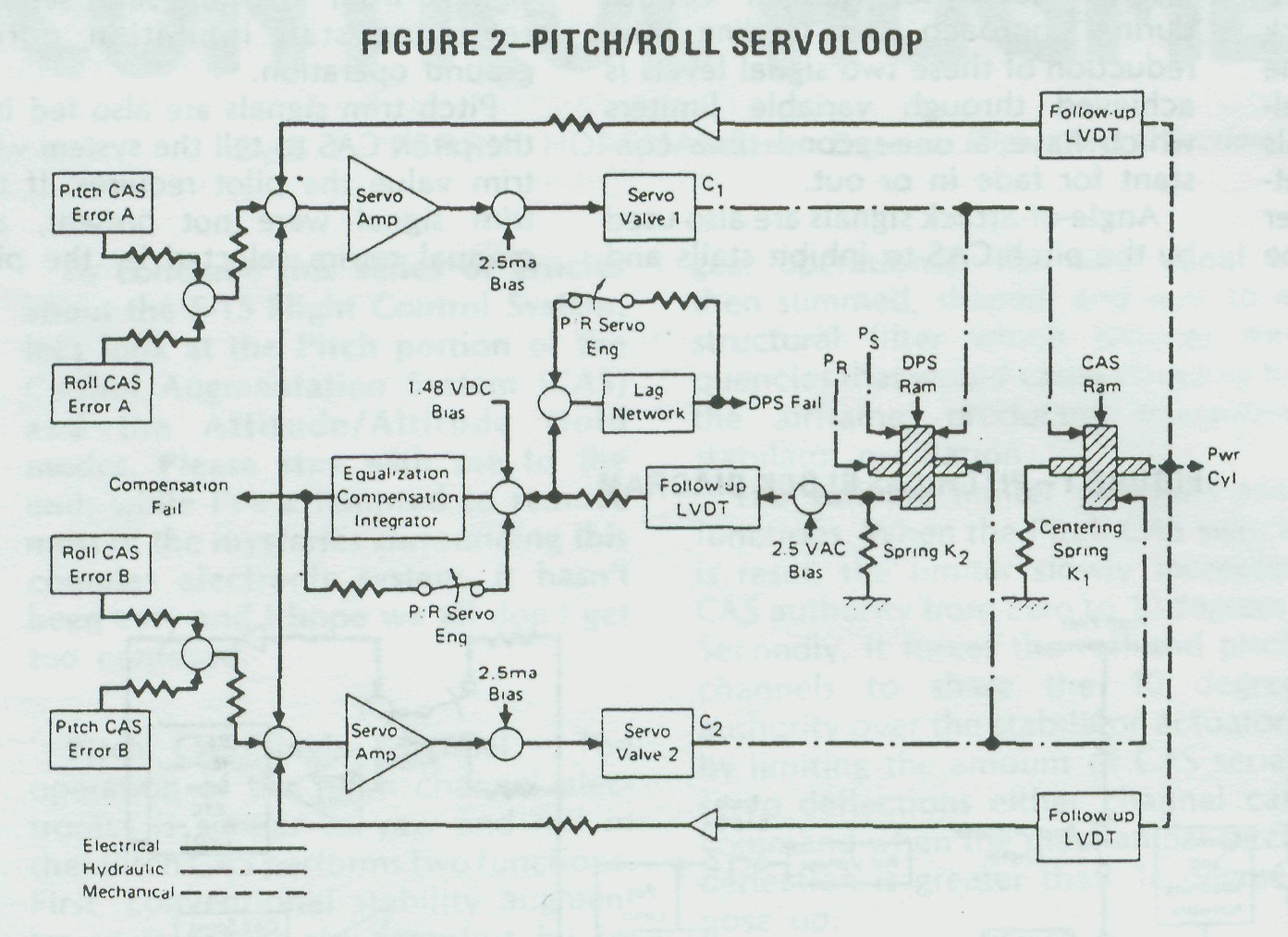
Pitch trim signals are also fed into the pitch CAS to tell the system what trim value the pilot requires. If this trim signal were not present, any manual retrim selected by the pilot would be defeated by the CAS returning the aircraft to the original trim position. Pitch CAS commands are also used to deflect the CAS inter-connect servo, located in the Pitch Trim Compensator module of the PRCA. These commands serve two functions. First, they insure that the mechanical and the CAS systems are tracking each other, minimizing any disagreement that may exist if the pitch CAS disengages and the mechanical system takes over. The second feature allows the CAS interconnect servo to carry an offset from null, allowing the CAS series servo (within the stabilator power cylinder) to maintain its full ±10 degree authority.
Pitch CAS Engage/Disengage Logic -
When the following conditions are satisfied, pitch CAS engagement is possible by placing the engage switch to ON or if on, pulling it back to RESET and then ON.
• Pitch CAS equalization error below failure-detect threshold (no pitch computation error).
• Differential pressure sensors and compensation output below failure -detect threshold.
• Aircraft yaw rate below disengage threshold (41.5 degrees/sec) and aircraft is not spinning.
• CAS interconnect servo has not failed.
The pitch CAS switch reset pulse will cause the CAS series servo shut-off valves and the CAS interconnect shutoff valves to be energized. In addition, the differential pressure sensor failure - detect circuit and equalization integrator will be activated.
Activation of the series servo and interconnect servo shutoff valves latches the necessary logic to keep the shutoff valves engaged. Simultane-ously, another latch circuit activates the pitch CAS engage limiter, fading from 0 to 100% authority (± 10 degree series servo), extinguishing the tele-panel fail light.
Disengagement of pitch/roll CAS occurs if any of the pre-engage conditions indicate a failure. Roll CAS may be reset if the failure has not occurred within the stabilator power cylinder or power cylinder wiring.
As long as the CAS series servos and differential pressure sensors have not failed, placing the Roll CAS switch to RESET will re-engage roll CAS.
Some nuisance disengagements of CAS may randomly occur. As long as they can be successfully reset and stay set, there is no cause for alarm.